
👓 تعلم الآلة للجميع - 2
بعدما عرفنا معلومات بسيطة عن الذكاء الإصطناعي وتعلم الآلة، لنتعمق ونبدأ بفهم طرق التعلم.
لا توجد طريقة واحدة لحل مشكلة
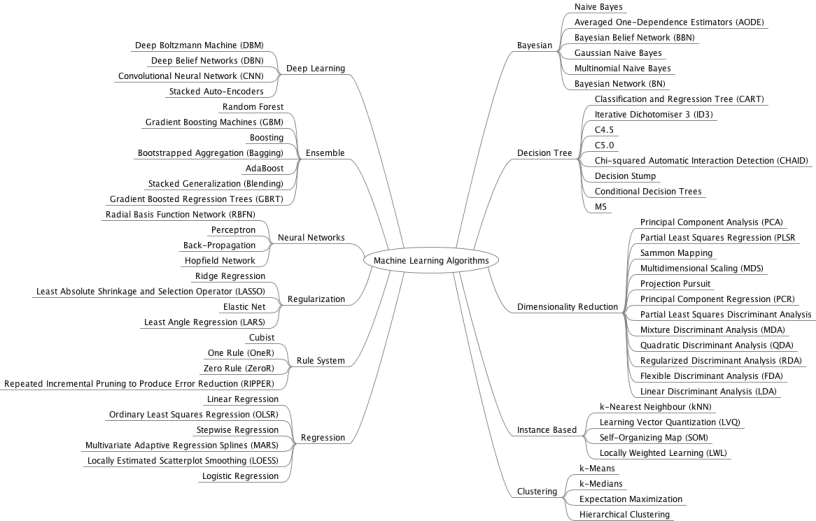
الصورة 1 أعلاه هي الخوارزميات المختلفة في علم الآلة، ودائماً ستجد أكثر من طريقة لحل المشكلة التي تواجهك، لذا يفضل أن تختار دائماً الخوارزمية ذات النتائج الأفضل.
لتوضيح الصوره، توجد ثلاث طرق لتعلم الآلة
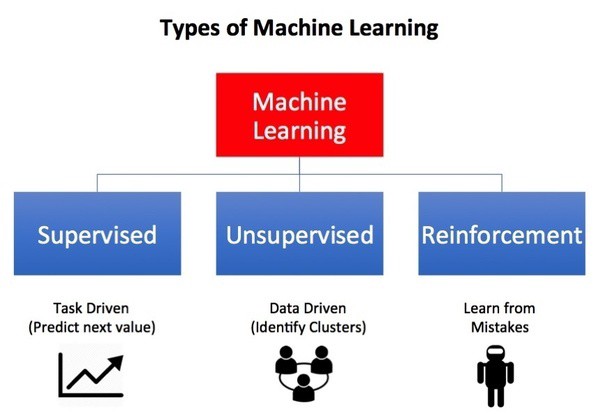
التعلم الموجَّه (Supervised Learning)
يعتمد على البيانات المٌعلْمة (Labeled Data) في التعلم. البيانات المُعلمّة هي بيانات عرفناها سابقاً وربطناها بنتائج، وتستخدم الآلة هذه المعلومات والبيانات للتعلم. 2
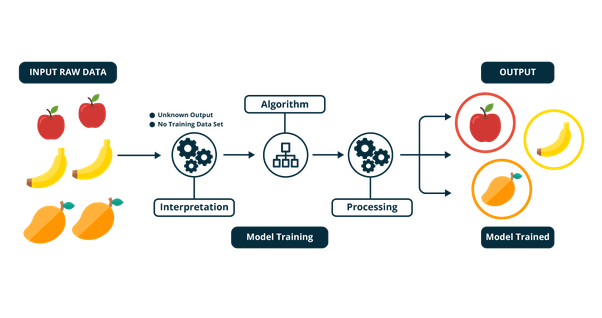
مثلاً لنستخدم الطفل في الصورة التالية، وهو يمثل الآلة لدينا:
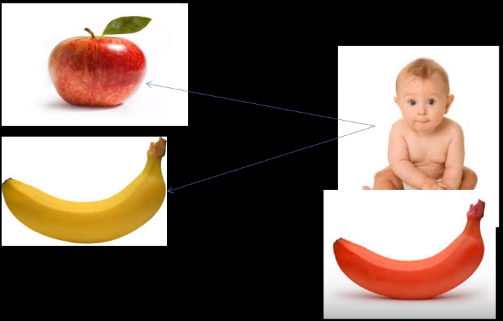
أذا احضرنا فاكهتين، تفاحة و موزة، وعلمنا (وجهنا) الطفل أن التفاحة شكلها دائري ولونها أحمر، بينما الموزة شكلها ليس دائري ولونها أصفر، هنا قمنا بتوجيه (Supervised) الطفل، وفي حال قدما للطفل صورة ثالثة لموزة ذات لون أحمر، فسيحدد النتيجة أنها موزة والسبب أننا عَلْمنا (Labeled) الصورتين السابقتين إلى قسمين، والطفل يفرق الآن بينهما. 3
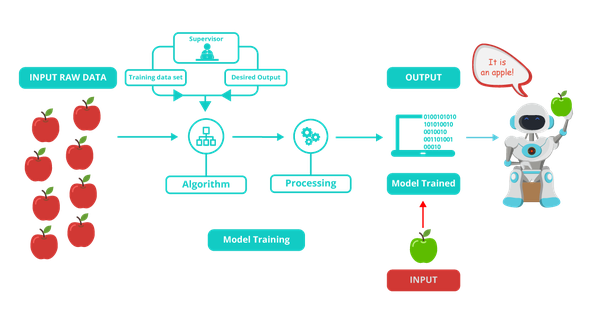
الفكرة الأساسية للتعلم الموجه هي تقديم البيانات ونتائجها وتدريب الآلة عليها. الآلة ستتعلم من البيانات التي تدربت عليها (Training Data) وتكون نموذج (Model) يتمكن من توقع نتيجة أي بيانات إضافية تُقَدم له.
التعلم الغير موجَّه (Unsupervised Learning)
على عكس التعلم الموجَّه، الآلة تُعطى بيانات وتتعلم من نفسها عن طريق محاولة إيجاد أنماط (Patterns)، يتم ذلك عن طريق تجميع (Clustering) البيانات التي لدينا إلى مجموعات حسب ما تتشابة فيه.
مثال على ذلك: عندما يكون لدينا بيانات كثيره عن منازل في مدينة معينة، نقوم بتقسيمها (Clusterting) حسب العنوان أو الحي الذي تتواجد فيه. 4
التعلم التعزيزي (Reinforcement Learning)
عندما لا نملك بيانات، الآله ستتعلم من نفسها وكل ما نحتاجه هو بيئة أو محيط تتعلم عليه الآلة. يتم إستخدام هذه الطريقة في السيارات ذاتية القيادة، الروبوتات و ألعاب الكمبيوتر. ويتم إكتشاف الخوارزمية المناسبه عن طريق التجارب (Trial & Error)، كلما قام الروبوت بعمل صحيح تتم مكافأته، والعكس إذا قام بعمل خاطئ، ومن الأخطاء يتعلم عدم تكرارها. 5
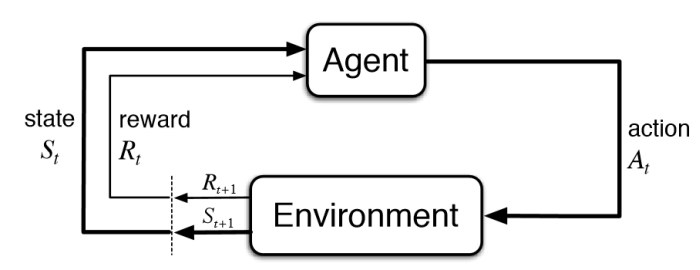
في الصورة العلوية هي دورة التعلم التعزيزي، وفيه:
- (Agent) الآلة: وهي الآله التي نعمل على تدريبها.
- (Environment) بيئة التعلم: وهي المكان الذي تقوم فيه التجارب.
- (State) الحالة: الوضع الحالي للروبوت أو الآداة التي نُعَلمها.
- (Reward) المكافئة (أو الرد بصح أو خطأ): وهي قرارات نحددها أثناء إنشاء قوانين المكافئات للآله، هذه القوانين تبين للآلة ما اذا كان فعلها صحيح أو خطأ، في كثير من الأحيان في حال كان الفعل من الآلة صحيح تعطى +1 أما إذا كان خاطئ تعطى 0 أو -1.
- (Action) الفعل: الحركة أو النشاط الذي قامت به الآلة.
العودة إلى تعلم الآلة للجميع - 1 - الإنتقال إلى تعلم الآلة للجميع - 3